Función de flujo de Stokes

.
En dinámica de fluidos, la función de corriente de Stokes se utiliza para describir las líneas de corriente y la velocidad de flujo en un flujo incompresible tridimensional con axisimetría. Una superficie con un valor constante de la función de corriente de Stokes encierra un tubo de corriente, en todas partes tangente a los vectores de velocidad del flujo. Además, el volumen dentro de este tubo de corriente es constante, y todas las líneas de corriente del flujo están situadas en esta superficie. El campo de velocidad asociado a la función de flujo de Stokes es un solenoidal, tiene divergencia cero. Esta función de flujo recibe su nombre en honor de George Gabriel Stokes.
Coordenadas cilíndricas

.
Consideremos un sistema de coordenadas cilíndricas ( ρ , φ , z ), con el eje z la línea alrededor de la cual el flujo incompresible es axisimétrico, φ el acimut y ρ la distancia al eje z. Entonces las componentes de la velocidad del flujo uρ y uz pueden expresarse en términos de la función de corriente de Stokes mediante:[1]


La componente azimutal de la velocidad uφ no depende de la función de flujo. Debido a la axisimetría, las tres componentes de la velocidad ( uρ , uφ , uz ) sólo dependen de ρ y z y no del acimut φ.
El flujo de volumen, a través de la superficie limitada por un valor constante ψ de la función de corriente de Stokes, es igual a 2π ψ.
Coordenadas esféricas
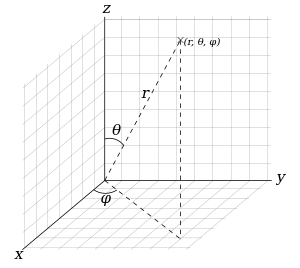
En coordenadas esféricas ( r , θ , φ ), r es la distancia radial desde el origen, θ es el ángulo cenital y φ es el ángulo azimutal. En flujo axisimétrico, con θ= 0 el eje de simetría rotacional, las cantidades que describen el flujo son de nuevo independientes del azimut φ. Las componentes de la velocidad del flujo ur y uθ están relacionadas con la función de corriente de Stokes a través de:[2]

De nuevo, la componente azimutal de la velocidad uφ no es una función de la función de Stokes ψ. El flujo de volumen a través de un tubo de corriente, limitado por una superficie de ψ constante, es igual a 2π ψ, como antes.
Vorticidad
La vorticidad se define como:
- , donde


con el vector unitario en la dirección.


Derivación de la vorticidad utilizando una función de flujo de Stokes Consideremos la vorticidad definida por A partir de la definición del gradiente en coordenadas esféricas:
Primero se observa que las componentes y son iguales a 0. Segundo sustituye y en El resultado es:
A continuación se realiza la operación algebraica siguiente:










Como resultado, del cálculo se encuentra que el vector vorticidad es igual a:
![{\displaystyle {\boldsymbol {\omega }}={\begin{pmatrix}0\\[1ex]0\\[1ex]\displaystyle -{\frac {1}{r\sin \theta }}\left({\frac {\partial ^{2}\Psi }{\partial r^{2}}}+{\frac {\sin \theta }{r^{2}}}{\partial \over \partial \theta }\left({\frac {1}{\sin \theta }}{\frac {\partial \Psi }{\partial \theta }}\right)\right)\end{pmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6f9fb7b9db57674b0172810e4c521b5c9207b649)
Comparación con las cilíndricas
Los sistemas de coordenadas cilíndricas y esféricas se relacionan a través de
- y


Definición alternativa con signo opuesto
Como se explica en el artículo general función de corriente, las definiciones que utilizan una convención de signo opuesto -para la relación entre la función de corriente de Stokes y la velocidad del flujo- también están en uso.[3]
Divergencia cero
En coordenadas cilíndricas, la divergencia del campo de velocidades u se convierte en:[4]

como era de esperar para un flujo incompresible.
Y en coordenadas esféricas:[5]

Líneas de corriente como curvas de función de corriente constante
Del cálculo se sabe que el vector gradiente es normal a la curva . Si se demuestra que en todas partes utilizando la fórmula para en términos de entonces se demuestra que las curvas de nivel de son líneas de corriente.





- Coordenadas cilíndricas
En coordenadas cilíndricas,
- .

y

De modo que

- Coordenadas esféricas
Y en coordenadas esféricas

y

De modo que

Referencias
- ↑ Batchelor (1967), p. 78.
- ↑ Batchelor (1967), p. 79.
- ↑ E.g. Brenner, Howard (1961). «El movimiento lento de una esfera a través de un fluido viscoso hacia una superficie plana». Chemical Engineering Science 16 (3-4): 242-251. doi:10.1016/0009-2509(61)80035-3.
- ↑ Batchelor (1967), p. 602.
- ↑ Batchelor (1967), p. 601.
Bibliografía
- Batchelor, G.K. (1967). An Introduction to Fluid Dynamics. Cambridge University Press. ISBN 0-521-66396-2.
- Lamb, H. (1994). Hydrodynamics (6th edición). Cambridge University Press. ISBN 978-0-521-45868-9. Originally published in 1879, the 6th extended edition appeared first in 1932.
- Stokes, G.G. (1842). «On the steady motion of incompressible fluids». Transactions of the Cambridge Philosophical Society 7: 439-453. Bibcode:1848TCaPS...7..439S.
Reprinted in: Stokes, G.G. (1880). Mathematical and Physical Papers, Volume I. Cambridge University Press. pp. 1–16.
| Control de autoridades |
|
|---|
 Datos: Q375628
Datos: Q375628







