単振動

単振動(たんしんどう、Simple harmonic motion)とは、量の時間変化が三角関数の正弦関数または余弦関数で表される振動である。調和振動(ちょうわしんどう)や、単調和振動、調和運動とも呼ばれる[1][2]。余弦関数(コサイン)を使った表現では、

という形で表現される。単振動の表現にはいくつかのバリエーションがあり、三角関数の他に複素指数関数による表現もよく使われる。一般に、次の形で表される微分方程式(定数係数斉次2階線形常微分方程式)の一般解は単振動となり、この形の方程式は単振動の方程式として知られる。

単振動は、振動現象あるいは波動現象における最も単純な形の振動であり、様々な物理現象を記述するとても重要な概念といえる。単振動の代表例は、減衰が無いと仮定したときの、フックの法則に従うばねで吊り下げられた重りの振動である。単振動を起こす系は、一般に調和振動子と呼ばれる。単振動の重ね合わせ(単振動同士の和)も、振動・波動の様々な場面で現れる。直角2方向にそれぞれ単振動する点はリサジュー図形と呼ばれる軌跡を描く。
余弦関数による表現と基礎用語

何かの量が時間経過に応じて変動しているとする。この量 x が単振動するとき、 x と時間 t の関係は余弦関数 cos によって
と記述できる[3]。変化量 x には変位、圧力、電圧、電流といったさまざまな量を当てはめることができる[3]。x が電流あるいは電圧の場合は、単振動ではなく正弦波と呼ぶこともある[4]。ただし、物理学の波動分野では、空間と時間を独立変数として正弦関数で表される進行波を指して正弦波と呼ぶ[5][4]。
単振動の場合、上式の A, ω, φ は全て時間に依存しない定数である[6]。式中の各パラメータの詳細は次のとおりである。
A は振幅と呼ばれる[7]。一般的に A の値は正とする[8]。x が物体の変位の振動を意味しているとすれば、変位の中立位置 (x = 0) から最大値に相当する[9][10]。x の値が A と −A の間を往復する振動となる[8]。
cos の中身 ωt + φ は位相と呼ばれる[10]。三角関数の中身であるため、位相は物理的次元を持たない無次元量で、しばしば角度とみなしてラジアンや度の単位をあてる[11]。ωt + φ を位相角とも呼ぶ[9]。三角関数の性質によって、位相が 2π 増えるたびに、x は同じ値に戻ることになる[12]。ここで π は円周率である。
φ は初期位相や初期位相角と呼ばれる[13][9]。これは、φ が t = 0 のときの位相の値を意味しているためである[13]。φ を位相定数と呼んだり、単に位相角とも呼ぶこともある[14][7]。φ に 2π の整数倍を加えた値、すなわち φ, φ ± 1 × 2π, φ ± 2 × 2π, … はいずれも同じ振動を表す[15]。これらの中から、式がなるべく簡単になるように φ の値を決めることができる[15]。
ω は角振動数や円振動数、角周波数と呼ばれる[16][17]。振幅と同じく、一般的に ω の値は正とする[8]。角振動数は、単位時間当たりの位相の変化量、あるいは位相の変化率を意味している[11]。単位は rad/s(ラジアン毎秒)または 1/s(毎秒)か Hz(ヘルツ)となる[7][17][11]。
上述のとおり、位相が 2π 増えるたびに x は同じ値に戻る[12]。位相が 2π 増えるのに必要な時間を周期と呼ぶ[8]。周期は記号 T などで表される[8]。周期の定義より、周期 T と角振動数 ω には

という関係があるから、T は ω によって次のように表される[8]。

また、周期の逆数 1/T を振動数あるいは周波数と呼ぶ[18][17]。振動数は記号 f や ν などで表され、角振動数によって表現すれば

となる[19][17]。振動数は 1 秒間に振動する回数を意味しており、単位は Hz(ヘルツ)である[17]。混乱のおそれが無い場合は、角振動数 ω を指して単に振動数と呼ぶこともある[13][17]。ただし、ω の値と f の値が 2π 倍違う点には常に注意を要する[10]。
その他の表現
正弦関数による表現
単振動は、下記に示すように他の形でも表現できる。どの形の表現が便利かは場合に依る[20]。正弦関数 sin を用いた場合、単振動は

と表される[21]。しかし、初期位相 φ の値を変えれば、sin の式でも cos の式でも全く同一の運動を表すことができる[8]。そのため、単振動を sin で表すか cos で表すかの違いに重要性は無い[8]。同一の単振動を、cos で表現したときの初期位相を φ とし、sin で表現したときの初期位相を φ′ とすれば、

という関係になる[16]。cos 形式の単振動を sin 形式に置きかえるときは、cos 形式だったときの初期位相に π/2 を加えてずらせばよい[12]。
余弦関数と正弦関数の和による表現
単振動は、次のような余弦関数と正弦関数の和の形でも表現できる[14]。

ここで、B1 と B2 は定数である[14]。単振動の正弦関数による表現
と比較すると、B1、B2 は振幅 A、初期位相 φ と次のような関係がある[14]。


自由振動の問題などでは、振幅と初期位相が既知として与えられるのではなく、t = 0 のときの x の値、および t = 0 のときの x の速度(後述参照)の値が与えられ、単振動の形が定まる[22]。これらの値を x0、v0 と表すとする。 この cos と sin の和の形式の場合、cos 側が x0 を表現する役割を持ち、sin 側が v0 を表現する役割を持つ[23]。すなわち、x0 と v0 が与えられたときの単振動は、下記のように表現できる[22]。

複素指数関数による表現

e をネイピア数、i を虚数単位とすれば、複素指数関数とは αeiβ の形式で表現される関数である[24]。単振動は、次のような複素指数関数の実部または虚部を取ったものに相当する[25]。


ここで、Re() は括弧内の複素数の実部を取ることを意味し、Im() は括弧内の複素数の虚部を取ることを意味する[25]。複素指数関数と三角関数にはオイラーの公式より、

という関係があるため、上記の式が導かれる[26]。複素指数関数の定数係数 A を複素数 Ac に拡張すれば、φ を陽に表さずに次のように表現できる[27]。

ここで、定数係数 Ac は A および φ と次のような関係である[27]。

したがって、この形式では、振幅 A と初期位相 φ の情報は複素数 Ac の中に含まれる[27]。複素数に拡張された振幅は複素振幅と呼ばれる[28]。
複素指数関数の形式は微分・積分しても関数の形が変わらないという利点がある[29]。また、振幅と初期位相という2つの数を1つの複素数にまとめることができ、数式処理が簡単となる[23]。こういった利点のために、本来は実数である x を一旦複素数に拡張し、何らかの計算後に最後に実部を取るという手法によって、過程の計算を簡便にできる[29]。このときに可能な計算は、和、差、微分、積分などの線形演算である[29]。こういった手法は、特に定数係数の線形微分方程式の問題を解くときに半ば常識的に多用される[30]。
複素共役な複素指数関数の和による表現
同じく複素指数関数を用いた形式として、

という形でも単振動を表す[20]。ここで、C1 と C2 は互いに複素共役な複素数の定数である[31]。この形式では、虚部が自然に打ち消されるようになっており、実部や虚部を取るといった特段の操作は必要ない[23]。この形式は実数の三角関数の式とあくまでも同一であり、表し方が違うだけである[23]。余弦関数と正弦関数の和による表現
と比較すると、B1, B2, C1 と C2 の定数の間には次のような関係がある[14]。


B1 と B2 は実数であるから、C1 + C2 は実数に、C1 − C2 は純虚数になる必要がある[14]。この制約から、C1 と C2 を共役複素数とする必要性が理解できる[14]。
円運動との関連

単振動は、次のように円上を等速運動する点を直線上へ投影したものとも見なせる[9]。xy-平面上に、始点 O、終点 P、一定長さ A の幾何ベクトル OP を考える。点 P が点 O を中心として一定速度 ω で反時計回りに回転しており、t = 0 で点 P は角度 φ の位置にあるとする。この点を x 軸に正射影すると、
となり、y 軸に射影すると、

となる[9]。位相を角度とみなすのも、この円運動との関連付けから意味を持つ[13]。複素指数関数による単振動の表現も、xy-実数平面を xy-複素平面に置き換えて、複素平面上の円運動を実部または虚部へ正射影したものと解することができる[32]。
速度と加速度

単振動する x の変化速度と変化加速度も三角関数で与えられる。cos 形式の x を t で微分すると、次のような速度 dx/dt が得られる[6]。

この式をもう一度 t で微分すると、次のような加速度 d 2x/dt 2 が得られる[6]。

したがって、速度と加速度は元の x と同じ角振動数の振動である[3]。一方で、速度の振幅は元の x の ω 倍、加速度の振幅は元の x の ω2 倍となっている[19]。上式を正符号の余弦関数に書き換えれば、


と表現できるので、速度の位相は元の x よりも π/2 (90°) 進んでおり、加速度の位相は元の x よりも π (180°) 進んでいることになる[6]。
複素指数関数形式

複素指数関数による形式では次のとおりである。単振動の複素指数関数の形式を t で1回微分すれば

となり、t で2回微分すれば、

となる[33]。したがって、元の x に iω を1回掛ければ速度となり、元の x に iω を2回掛ければ加速度になる[33]。また、

という関係があるので、上式は次のような位相の関係が明確にした形に変形できる[33]。


これらの実部が、cos 形式の x の速度と加速度に対応する[26]。
相平面上の軌道

速度 dx/dt を改めて変数 v と表し、x と v の組を状態点とすれば、単振動のxv-相平面における軌道について考えられる。このとき、単振動は次のような2変数の微分方程式系で表される[34]。

上式の第1式両辺に ω2x を掛けたものと、上式の第2式両辺に v を掛けたものとを足し合わせると、

という式が得られる[35]。これを t で積分し、積分定数を C とすれば、次のような式になる[35]。

したがって、xv-相平面上での単振動の軌道は楕円になる[35]。この楕円軌道は、時間経過に従って時計回りに進む[36]。上平面 (v > 0) では、dx/dt が正なので軌道は右方向へ進む。下平面 (v < 0) では、dx/dt が負なので軌道は左方向へ進む[34]。
単振動が現れる系
単振動は、物理学全域でさまざまな形で現れる[37]。力学的なものから電磁気学的なものまで、単振動の実例は幅広い[37]。単振動は、振動および波動という現象における最も単純な形であり、なおかつ様々な物理現象を記述する概念として高い重要性を持つ[38]。


単振動が起こる系は調和振動子と呼ばれる[39]。調和振動子の代表例の一つが、質点とばねの系である[40]。重り(質点)がばねで吊り下げられて揺れている系を考える[41]。ばねはフックの法則に従うとする[42]。現実には空気の抵抗などによって振動は次第に止まるが、そのような減衰作用は今は無視する[43]。重りの質量を m、ばねのばね定数を k、吊り下げられた重りが静止している状態からの上下方向変位を δ とする。この重りの運動方程式は

となる[41]。さらに、両辺を m で割り、k/m = ωn2 とおいて

と変形する[44]。この式は定数係数の斉次2階線形常微分方程式であり、δ の一般解は次のような単振動で与えられる[45]。

その他の単振動の表現(余弦関数と正弦関数の和や複素共役な複素指数関数の和)も、δ の一般解である[46]。この単振動の角振動数 ωn は

であるから、揺らし始めるときに重りを最初に動かす量や重力の大きさなどとは無関係に決まっている[43]。ωn は、ばね定数と質量という系に固有の値のみで決まるため、固有角振動数と呼ばれる[47]。一方、振幅 A と初期位相 φ の値は、最初にどのような状態が重りに与えられるかによって決まる。t = 0 で与えられる変位を δ0 、速度を v0 と表せば、A と φ は次のように与えられる[48]。


一般に、ω を正の定数として、

という形で表される微分方程式は単振動の方程式と呼ばれ、その一般解は単振動となる[49][50]。dx/dt = v と表すとき、単振動の系は次のようなハミルトニアン H を持つため、系はハミルトン系としての特性を持つ[34]。

すなわち、

が満たされ、dH/dt が常に 0 より H の値は時間に対して不変である[34]。物理的な系では、ハミルトニアン H は系が持つエネルギーに相当し、H が時間不変であることは単振動がエネルギーを保存しながら運動していることを意味する[34]。
物理学で現れるその他の単振動の例には、振り子、電気回路のLC回路、2原子分子の熱振動などがある[51]。一般的に、保存力を受ける系で、そのポテンシャルエネルギーの極小点近傍で振動していれば、その運動は調和振動子に近似できる[52]。
重ね合わせ
同一方向の重ね合わせ

単振動同士の和を作ることを、単振動の重ね合わせや単振動の合成と呼ぶ[53]。単振動の重ね合わせは、振動・波動の多くの場面で現れる[54]。例えば、自由度 n の線形多自由度系の振動の非減衰自由振動は、単振動の n 個の重ね合わせで表現できる[55]。また、フーリエ級数を使えば、与えられた様々な周期運動を単振動の無限の重ね合わせで表現できる[56]。
2つの単振動する量 x1 と x2 を考える。これらが同一方向(同じ x 軸方向)の振動だとすれば、その重ね合わせは、

となる[57]。単振動を幾何ベクトルとして考えれば、単振動の重ね合わせとは、円運動するベクトル OP1 と円運動するベクトル OP2 の和 OP = OP1 + OP2 を作成して、OP を軸へ射影していることに等しい[58]。上式は、合成や加法定理といった三角関数の公式を用いて下記のように変形できる[59]。

ただし、ここで振幅 A と位相角 ψ は下記のような時間の関数である[60]。
![{\displaystyle A={\sqrt {A_{1}^{2}+A_{1}^{2}+2A_{1}A_{2}\cos \left[(\omega _{1}-\omega _{2})t+\phi _{1}-\phi _{2}\right]}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dada66e29a3604d2dcccc7b7e8f62f7afb61079a)

簡単な場合として、2つの単振動の角振動数が同じ (ω1 = ω2) ときは、重ね合わされた振動も単振動になる[57][58]。このとき、A と ψ は時間依存しない定数になる[61]。2つの単振動の同一角振動数を ω とすれば、重ね合わされた振動も ω の単振動となる[62]。このときの単振動は次式で与えられる[62]。



2つの単振動の角振動数が異なるときは、重ね合わされた振動は複雑な形となり、もはや単振動ではなくなる[63][64]。2つの単振動の角振動数の比 ω2/ω1 あるいは ω1/ω2 が有理数ならば、重ね合わされた振動は、複雑だがある周期を持った振動である[63][57]。一方、角振動数の比が無理数ならば、重ね合わされた振動には周期が存在せず、同一波形が繰り返されることのない振動になる[63][64]。2つの単振動の角振動数の比が近い (ω1 ≈ ω2) 場合は、うなりと呼ばれる振動波形になる[65]。
- 同一方向の重ね合わせの例(赤点線と青点線が元の単振動、黒実線が合成後の振動)
-
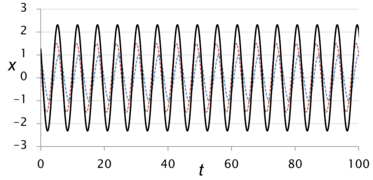 ω1 = ω2(同一値、単振動)
ω1 = ω2(同一値、単振動) -
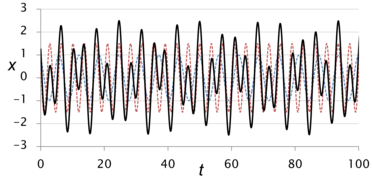 ω2/ω1 = √2(無理数、無周期運動)
ω2/ω1 = √2(無理数、無周期運動) -
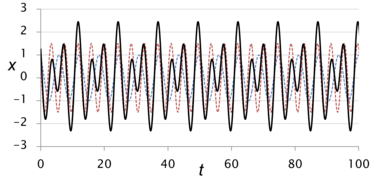 ω2/ω1 = 1.5(有理数、周期運動)
ω2/ω1 = 1.5(有理数、周期運動) -
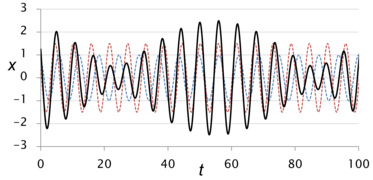 ω2/ω1 = 1.1(近い値、うなり)
ω2/ω1 = 1.1(近い値、うなり)




直角方向の重ね合わせ

詳細は「リサジュー図形」を参照
互いに直角する方向の単振動の重ね合わせも考えられる[66]。xy-平面上の点が、x 方向に

という単振動をして、なおかつ y 方向に

という単振動をしている場合を考える。このときの点の軌跡は、一般にリサジュー図形と呼ばれる曲線になる[66]。もし ω1 = ω2 であれば、軌跡は楕円となる[67]。なおかつ初期位相の差 φ2 − φ1 が π の整数倍であれば、軌跡は直線になる[67]。同一方向のときと同様に、ω1/ω2 が有理数であれば、周期的な軌跡となり、リサジュー図形は閉曲線となる[68]。ω1/ω2 が無理数であれば、リサジュー図形は閉じることのない曲線となる[66]。
出典
- ^ 日本機械学会. “調和運動”. 機械工学事典. 2021年2月23日閲覧。
- ^ デジタル大辞泉(小学館). “単振動(たんしんどう) の意味”. goo辞書. 2021年2月24日閲覧。
- ^ a b c 近 2006, p. 6.
- ^ a b 近 2006, p. 181.
- ^ 小出 1997, p. 137.
- ^ a b c d 横山・日野・芳村 2015, p. 6.
- ^ a b c 下郷・田島 2002, p. 6.
- ^ a b c d e f g h 安田 2012, p. 18.
- ^ a b c d e 横山・日野・芳村 2015, p. 5.
- ^ a b c 鈴木 2004, p. 7.
- ^ a b c 近 2006, p. 4.
- ^ a b c 長谷川 2009, p. 7.
- ^ a b c d 安田 2012, p. 19.
- ^ a b c d e f g 小出 1997, p. 17.
- ^ a b 近 2006, p. 5.
- ^ a b 藤田 2016, p. 15.
- ^ a b c d e f 長谷川 2009, p. 8.
- ^ 近 2006, p. 3.
- ^ a b 藤田 2016, p. 16.
- ^ a b 安田 2012, p. 33.
- ^ 下郷・田島 2002, p. 5.
- ^ a b 藤田 2016, p. 26.
- ^ a b c d 長松 昌男・長松 昭男、2018、『実用モード解析入門』初版、コロナ社 ISBN 978-4-339-08227-2 pp. 30–31
- ^ 日本機械学会. “複素指数関数”. 機械工学事典. 2021年2月24日閲覧。
- ^ a b 入江・小林 2006, p. 8.
- ^ a b 近 2006, p. 17.
- ^ a b c 下郷・田島 2002, p. 7.
- ^ 横山・日野・芳村 2015, p. 11.
- ^ a b c 近 2006, p. 18.
- ^ 小野寺 嘉孝、2000、『なっとくする複素関数』、講談社サイエンティフィク〈なっとくシリーズ〉 ISBN 4-06-154526-4 p. 22
- ^ 横山・日野・芳村 2015, p. 28.
- ^ 下郷・田島 2002, pp. 6–7.
- ^ a b c 鈴木 2004, p. 8.
- ^ a b c d e 郡 宏・森田 善久、2011、『生物リズムと力学系』初版、共立出版〈シリーズ・現象を解明する数学〉 ISBN 978-4-320-11000-7 pp. 47–48
- ^ a b c 横山・日野・芳村 2015, p. 47.
- ^ 横山・日野・芳村 2015, pp. 47–48.
- ^ a b 小出 1997, p. 115.
- ^ 長谷川 2009, p. 5.
- ^ デジタル大辞泉(小学館). “調和振動子(ちょうわしんどうし) の意味”. goo辞書. 2021年2月24日閲覧。
- ^ 近 2006, p. 8.
- ^ a b 鈴木 2004, p. 22.
- ^ 長谷川 2009, pp. 5–6.
- ^ a b 長谷川 2009, p. 6.
- ^ 入江・小林 2006, p. 13.
- ^ 下郷・田島 2002, pp. 19–21.
- ^ 下郷・田島 2002, p. 20.
- ^ 安田 2012, p. 34.
- ^ 下郷・田島 2002, p. 21.
- ^ 東京理科大学数学教育研究所、2010、『数学小辞典』第2版、共立出版 ISBN 978-4-320-01931-7 p. 402
- ^ 俣野 博、1993、『微分方程式 I』第1版、岩波書店〈岩波講座 応用数学〉 ISBN 4-00-010517-5 p. 56
- ^ 長谷川 2009, pp. 9–20.
- ^ 長谷川 2009, p. 13.
- ^ 近 2006, p. 64.
- ^ 近 2006, p. 63.
- ^ 安田 2012, p. 122.
- ^ 安田 2012, p. 20.
- ^ a b c 藤田 2016, p. 18.
- ^ a b 鈴木 2004, p. 10.
- ^ 横山・日野・芳村 2015, pp. 7–8.
- ^ 横山・日野・芳村 2015, p. 8.
- ^ 横山・日野・芳村 2015, p. 9.
- ^ a b 入江・小林 2006, p. 6.
- ^ a b c 近 2006, p. 66.
- ^ a b 藤田 2016, pp. 18–19.
- ^ 近 2006, pp. 66–68.
- ^ a b c 近 2006, p. 77.
- ^ a b 小出 1997, pp. 115–116.
- ^ 戸田 盛和、1982、『力学』、岩波書店〈物理入門コース 1〉 ISBN 4-00-007641-8 p. 63
参照文献
- 近 桂一郎、2006、『振動・波動』第1版、裳華房〈裳華房フィジックスライブラリー〉 ISBN 4-7853-2226-8
- 長谷川 修司、2009、『振動・波動』、講談社〈講談社基礎物理学シリーズ 2〉 ISBN 978-4-06-157202-7
- 鈴木 浩平、2004、『振動の工学』、丸善〈機械工学基礎コース〉 ISBN 4-621-07377-X
- 横山 隆・日野 順市・芳村 敏夫、2015、『基礎振動工学』第2版、共立出版 ISBN 978-4-320-08211-3
- 藤田 勝久、2016、『振動工学 ―振動の基礎から実用解析入門まで』新装版、森北出版 ISBN 978-4-627-66542-2
- 安田 仁彦、2012、『振動工学 ―基礎編』改訂版、コロナ社 ISBN 978-4-339-04624-3
- 小出 昭一郎、1997、『物理学』三訂版、裳華房 ISBN 4-7853-2074-5
- 下郷 太郎・田島 清灝、2002、『振動学』初版、コロナ社〈機械系 大学講義シリーズ 11〉 ISBN 4-339-04045-2
- 入江 敏博・小林 幸徳、2006、『機械振動学通論』第3版、朝倉書店 ISBN 978-4-254-23116-8
外部リンク
ウィキメディア・コモンズには、単振動に関連するカテゴリがあります。
ウィクショナリーに関連の辞書項目があります。
単振動







