Sinus, Kosinus und Cosinus sind Weiterleitungen auf diesen Artikel. Zu weiteren Bedeutungen siehe Sinus (Begriffsklärung), Kosinus (Begriffsklärung) und Cosinus (Begriffsklärung).
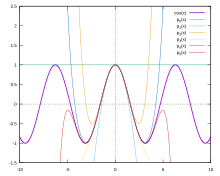
Graphen der Sinusfunktion (rot) und der Kosinusfunktion (blau). Beide Funktionen haben eine kleinste positive Periode von und nehmen jeweils alle Werte von −1 bis 1 an.
Sinus- und Kosinusfunktion (auch Cosinusfunktion) sind elementare mathematische Funktionen. Vor Tangens und Kotangens sowie Sekans und Kosekans sind sie die wichtigsten trigonometrischen Funktionen. Sinus und Kosinus werden unter anderem in der Geometrie für Dreiecksberechnungen in der ebenen und sphärischen Trigonometrie benötigt. Auch in der Analysis sind sie wichtig.
Wellen wie Schallwellen, Wasserwellen und elektromagnetische Wellen lassen sich als Zusammensetzung aus Sinus- und Kosinuswellen beschreiben, sodass die Funktionen auch in der Physik als harmonische Schwingungen allgegenwärtig sind.
Inhaltsverzeichnis
1Herkunft des Namens
2Geometrische Definition
2.1Definition am rechtwinkligen Dreieck
2.2Definition am Einheitskreis
3Analytische Definition
3.1Motivation durch Taylorreihen
3.2Reihenentwicklung in der Analysis
3.3Beziehung zur Exponentialfunktion
3.4Definition über das Integral
3.5Definition über analytische Berechnung der Bogenlänge
3.6Definition als Lösung einer Funktionalgleichung
3.7Produktentwicklung
4Regeln über den Wertebereich
4.1Zusammenhang zwischen Sinus und Kosinus
4.2Verlauf des Sinus in den vier Quadranten
4.3Verlauf des Kosinus in den vier Quadranten
4.4Komplexes Argument
5Spezielle Funktionswerte
5.1Wichtigste Funktionswerte
5.2Beweisskizzen der Werte
5.3Weitere mit Quadratwurzeln angebbare Funktionswerte
5.4Mit Winkeldreiteilung angebbare Funktionswerte
6Mulitplikationsformeln und begrenzte Reihe
7Fixpunkte
8Berechnung
9Umkehrfunktion
10Zusammenhang mit dem Skalarprodukt
11Zusammenhang mit dem Kreuzprodukt
12Additionstheoreme
13Orthogonale Zerlegung
14Ableitung, Integration und Krümmung von Sinus und Kosinus
14.1Ableitung
14.2Stammfunktion
14.3Krümmung
15Anwendungen
15.1Allgemeines Dreieck
15.2Sektrix
15.2.1Konstruktion
15.2.2Nachweis
15.3Fourierreihen
15.4Informatik
15.5Physik
15.6Elektrotechnik
16Siehe auch
17Literatur
18Weblinks
19Einzelnachweise
Herkunft des Namens
Die lateinische Bezeichnung Sinus „Bogen, Krümmung, Busen“ für diesen mathematischen Begriff wählte Gerhard von Cremona 1175[1] als Übersetzung der arabischen Bezeichnung dschaib oder dschība / جيب / ‚Tasche, Kleiderfalte‘, selbst entlehnt von Sanskrit jiva „Bogensehne“ indischer Mathematiker.
Die Bezeichnung „Cosinus“ ergibt sich aus complementi sinus, also Sinus des Komplementärwinkels. Diese Bezeichnung wurde zuerst in den umfangreichen trigonometrischen Tabellen verwendet, die von Georg von Peuerbach und seinem Schüler Regiomontanus erstellt wurden.[2]
Geometrische Definition
Definition am rechtwinkligen Dreieck
Dreieck mit den Punkten A, B, C und den bzw. gegenüberliegenden Seiten a, b, cDreieck ABC mit einem rechten Winkel in C (Benennung von An- und Gegenkathete unter der Annahme, dass sich diese Begriffe auf den Winkel beziehen)
Diese Eigenschaft wird benutzt, um Berechnungen am rechtwinkligen Dreieck durchzuführen. Sind nämlich die Längenverhältnisse im rechtwinkligen Dreieck bekannt, lassen sich die Maße von Winkeln und die Längen von Seiten berechnen. Deshalb haben die Längenverhältnisse im rechtwinkligen Dreieck auch besondere Namen.
Die Längenverhältnisse der drei Seiten im rechtwinkligen Dreieck sind nur vom Maß eines der beiden spitzen Winkel abhängig. Denn die Innenwinkelsumme in jedem Dreieck beträgt 180°. Und weil im rechtwinkligen Dreieck ein Winkel, nämlich der rechte Winkel, mit 90° bekannt ist, müssen die beiden anderen Winkel in der Summe ebenfalls 90° ergeben. Deswegen wird das Maß eines dieser Winkel durch das Maß des anderen Winkels bereits festgelegt. Aufgrund der Kongruenzsätze (z. B. WSW) hängen die Längenverhältnisse im rechtwinkligen Dreieck nur noch vom Maß eines der beiden spitzen Winkel ab.
Deshalb werden die Längenverhältnisse in Abhängigkeit eines der beiden spitzen Winkel wie folgt definiert:
Der Sinus eines Winkels ist das Verhältnis der Länge der Gegenkathete (Kathete, die dem Winkel gegenüberliegt) zur Länge der Hypotenuse (Seite gegenüber dem rechten Winkel).
Der Kosinus ist das Verhältnis der Länge der Ankathete (das ist jene Kathete, die einen Schenkel des Winkels bildet) zur Länge der Hypotenuse.
Bei den für Dreiecke üblichen Bezeichnungen der Größen (siehe Abbildung) gilt hier:
Da die Hypotenuse die längste Seite eines Dreiecks ist (denn sie liegt dem größten Winkel, also dem rechten Winkel, gegenüber), gelten die Ungleichungen und .
Wird statt von α von dem gegenüberliegenden Winkel β ausgegangen, so wechseln beide Katheten ihre Rolle, die Ankathete von α wird zur Gegenkathete von β, die Gegenkathete von α bildet nun die Ankathete von β und es gilt:
Da im rechtwinkligen Dreieck gilt, folgt:
und
Auf dieser Beziehung beruht auch die Bezeichnung Kosinus als Sinus des Komplementärwinkels.
Im rechtwinkligen Dreieck sind Sinus und Kosinus nur für Winkel zwischen 0 und 90 Grad definiert. Für beliebige Winkel wird der Wert der Kosinusfunktion als -Koordinate und der Wert der Sinusfunktion als -Koordinate eines Punktes am Einheitskreis (siehe unten) definiert. Hier ist es üblich, den Wert, auf den die Funktion angewendet wird (hier: den Winkel), als Argument zu bezeichnen. Dies betrifft insbesondere die Winkelfunktionen und die komplexe Exponentialfunktion (siehe unten).
Definition am Einheitskreis
Definition des Sinus und Kosinus am EinheitskreisTrigonometrische Funktionen am Einheitskreis im ersten Quadranten
Im rechtwinkligen Dreieck ist der Winkel zwischen Hypotenuse und Kathete nur für Werte von 0 bis 90 Grad definiert. Für eine allgemeine Definition wird ein Punkt mit den Koordinaten auf dem Einheitskreis betrachtet, hier gilt . Die positive -Achse schließt mit dem Ortsvektor von einen Winkel ein. Der Koordinatenursprung , der Punkt auf der -Achse und der Punkt bilden ein rechtwinkliges Dreieck. Die Länge der Hypotenuse beträgt . Die Ankathete des Winkels ist die Strecke zwischen und und hat die Länge . Es gilt:
Die Gegenkathete des Winkels ist die Strecke zwischen und und hat die Länge . Somit gilt:
Die -Koordinate eines Punktes im ersten Quadranten des Einheitskreises ist also der Kosinus des Winkels zwischen seinem Ortsvektor und der -Achse, während die -Koordinate der Sinus dieses Winkels ist. Die Fortsetzung über den ersten Quadranten hinaus ergibt eine Definition von Sinus und Kosinus für beliebige Winkel.
Die Umkehrungen der Sinus- und Kosinusfunktion sind nicht eindeutig. Zu jeder Zahl zwischen −1 und 1 () gibt es schon zwischen 0° und 360° () immer genau zwei Winkel. Symmetrien der Winkelfunktionen erkennt man an folgenden Beziehungen:
Punktsymmetrien:
Achsensymmetrien:
Der Sinus ist also eine ungerade Funktion, der Kosinus eine gerade.
Sinus und Kosinus sind periodische Funktionen mit der Periode 360 Grad. (Man kann einen Winkel von beispielsweise 365° nicht von einem Winkel von 5° unterscheiden. Aber der eine beschreibt eine Drehbewegung von reichlich einer Umdrehung, der andere eine sehr kleine Drehbewegung ‒ nur eine zweiundsiebzigstel Umdrehung.) Also gilt auch
sowie
,
wobei eine beliebige ganze Zahl ist. Es gibt also nicht nur die Symmetrien zu (cos) bzw. (sin) und zu (sin) bzw. (cos), sondern unendlich viele Symmetrieachsen und Symmetriezentren für beide Funktionen.
Die Entstehung der Sinus- und Kosinusfunktion aus der Drehbewegung eines Winkelschenkels beginnend bei der -Achse veranschaulicht folgende Animation. Der Winkel wird im Bogenmaß gemessen. Ein Winkel von entspricht einem Bogenmaß von .
Animation zur Konstruktion der Sinus- und Kosinusfunktion
zusammen mit den ersten Taylorpolynomen Diese Animation illustriert die Definition der Sinusfunktion durch eine Reihe. Je größer die Zahl ist, desto mehr Summanden werden in der Reihendefinition verwendet. So ist bei neben der Sinusfunktion zusätzlich das kubische Polynom eingezeichnet.
Sinus und Kosinus sind als Funktionen von nach erklärt. Sie sind beliebig oft differenzierbar. Für die Ableitungen im Nullpunkt gilt:
Die sich daraus ergebenden Taylorreihen stellen die Funktionen und dar, das heißt:
Reihenentwicklung in der Analysis
In der Analysis geht man umgekehrt von den Reihenentwicklungen aus und leitet daraus alles her, indem die Funktionen sin und cos durch die oben angegebenen Potenzreihen erklärt werden. Mit dem Quotientenkriterium lässt sich zeigen, dass diese Potenzreihen für jede komplexe Zahlabsolut und in jeder beschränkten Teilmenge der komplexen Zahlen gleichmäßig konvergieren. Diese unendlichen Reihen verallgemeinern die Definition des Sinus und des Kosinus von reellen auf komplexe Argumente. Auch wird dort üblicherweise nicht geometrisch, sondern beispielsweise über die cos-Reihe und die Beziehung als das Doppelte der kleinsten positiven Nullstelle der Kosinusfunktion definiert. Damit ist eine präzise analytische Definition von gegeben.
Für kleine Werte zeigen diese Reihen ein sehr gutes Konvergenzverhalten. Zur numerischen Berechnung lassen sich daher die Periodizität und Symmetrie der Funktionen ausnutzen und der -Wert bis auf den Bereich bis reduzieren. Danach sind je nach geforderter Genauigkeit nur noch relativ wenige Glieder der Reihe zu berechnen. Das Taylorpolynom der Kosinusfunktion bis zur vierten Potenz z. B. hat im Intervall einen relativen Fehler von unter 0,05 %. Im Artikel Taylor-Formel sind einige dieser Taylorpolynome grafisch dargestellt und man findet eine Näherungsformel mit Genauigkeitsangabe. Zu beachten ist allerdings, dass die Teilsummen der Taylorpolynome nicht die bestmögliche numerische Approximation darstellen; beispielsweise in Abramowitz-Stegun finden sich Näherungspolynome mit noch kleinerem Approximationsfehler.[3]
Für eine reelle Zahl ist also der Realteil und der Imaginärteil der komplexen Zahl .
Durch Ersetzung von durch ergibt sich:
Diese und die vorangegangenen Gleichungen lassen sich nach den trigonometrischen Funktionen auflösen. Es folgt:
Diese Gleichungen gelten nicht nur für reelle Argumente, sondern für beliebige komplexe Zahlen. Somit ergibt sich eine alternative Definition für die Sinus- und Kosinusfunktion. Durch Einsetzen der Exponentialreihe leiten sich die oben vorgestellten Potenzreihen ab.
Ausgehend von dieser Definition lassen sich viele Eigenschaften, wie zum Beispiel die Additionstheoreme des Sinus und Kosinus, nachweisen.
Definition über das Integral
Der Sinus ist die Umkehrfunktion des Integrals zur Berechnung der Bogenlänge
Definition über analytische Berechnung der Bogenlänge
Die Definition des Sinus und Kosinus als Potenzreihe liefert einen sehr bequemen Zugang, da die Differenzierbarkeit durch die Definition als konvergente Potenzreihe automatisch gegeben ist. Die Eulerformel ist ebenfalls eine einfache Konsequenz aus den Reihendefinitionen, da sich die Reihen für und ganz offenbar zur Exponentialfunktion zusammenfügen, wie oben gezeigt wurde. Durch Betrachtung der Funktion , die das Intervall auf die Kreislinie abbildet, ergibt sich die Beziehung zur Geometrie, denn und sind nichts weiter als der Real- bzw. Imaginärteil von , das heißt die Projektionen dieses Punktes auf die Koordinatenachsen.
Neben gibt es auch andere sinnvolle Parametrisierungen des Einheitskreises, etwa
Geht man von dieser Formel aus, erhält man einen alternativen Zugang. Die Länge dieser Kurve wird auch als Bogenlänge bezeichnet und berechnet sich zu
Wie leicht zu zeigen ist, ist ungerade, stetig, streng monoton wachsend und beschränkt. Da die gesamte Bogenlänge dem Kreisumfang entspricht, folgt, dass das Supremum von gleich ist; wird bei dieser Vorgangsweise analytisch als Supremum von definiert.
Die Funktion
ist auch differenzierbar:
Weil sie stetig und streng monoton wachsend ist, ist sie auch invertierbar, und für die Umkehrfunktion
gilt:
Mit Hilfe dieser Umkehrfunktion lassen sich nun Sinus und Kosinus als - und -Komponente von analytisch definieren:
Bei dieser Definition des Sinus und Kosinus über die analytische Berechnung der Bogenlänge werden die geometrischen Begriffe sauber formalisiert. Sie hat allerdings den Nachteil, dass im didaktischen Aufbau der Analysis der Begriff der Bogenlänge erst sehr spät formal eingeführt wird und daher Sinus und Kosinus erst relativ spät verwendet werden können.
Definition als Lösung einer Funktionalgleichung
Ein anderer analytischer Zugang ist, Sinus und Kosinus als Lösung einer Funktionalgleichung zu definieren, die im Wesentlichen aus den Additionstheoremen besteht: Gesucht ist ein Paar stetiger Funktionen, das für alle die Gleichungen
erfüllt. Die Lösung definiert dann den Sinus, die Lösung den Kosinus. Um Eindeutigkeit zu erreichen, sind einige Zusatzbedingungen zu erfüllen. In Heuser, Lehrbuch der Analysis, Teil 1 wird zusätzlich gefordert, dass
ist. Bei diesem Zugang wird offensichtlich die Differenzierbarkeit des Sinus an der Stelle 0 vorausgesetzt; wird in weiterer Folge analytisch als das Doppelte der kleinsten positiven Nullstelle des Kosinus definiert. Verwendet man den Zugang von Leopold Vietoris[4] und berechnet die Ableitung des Sinus aus den Additionstheoremen, so ist es zweckmäßiger, auf geeignete Weise analytisch (beispielsweise als Hälfte des Grenzwerts des Umfangs des dem Einheitskreis eingeschriebenen -Ecks) zu definieren und dann die Differenzierbarkeit der Lösung dieser Funktionalgleichung zu beweisen. Als Zusatzbedingung zu den Additionstheoremen fordert man dann beispielsweise:
,
und
für alle .
Unter den gewählten Voraussetzungen ist die Eindeutigkeit der Lösung der Funktionalgleichung relativ einfach zu zeigen; die geometrisch definierten Funktionen Sinus und Kosinus lösen auch die Funktionalgleichung. Die Existenz einer Lösung lässt sich analytisch beispielsweise durch die Taylorreihen von Sinus und Kosinus oder eine andere der oben verwendeten analytischen Darstellungen von Sinus und Kosinus die Funktionalgleichung nachweisen und tatsächlich lösen.
Produktentwicklung
Die Kreisfunktionen Sinus und Cosinus haben folgende zwei Produktentwicklungen:
Die genannte Produktentwicklung für den Sinus zog der schweizerische Mathematiker Leonhard Euler für den Beweis vom Basler Problem heran.
Der ebenso nach diesem Mathematiker benannte Eulersche Ergänzungssatz für die Fakultätsfunktion 𝚷(n) liefert in Kombination mit der Eulerschen Produktdefinition der Fakultätsfunktion direkt die gezeigte Produktformel für die trigonometrische Sinusfunktion:
Mit dem Buchstaben des kleinen ist hier in der Tat die Kreiszahl gemeint.
Jedoch steht das große in der genannten Formel für die Gaußsche Pifunktion also für die kontinuisierte Form der Fakultätsfunktion.
Insbesondere folgt daraus und . Diese Ungleichungen gelten aber nur für reelle Argumente ; für komplexe Argumente können Sinus und Kosinus beliebige Werte annehmen.
Verlauf des Sinus in den vier Quadranten
In den vier Quadranten ist der Verlauf der Sinusfunktion folgendermaßen:
Für Argumente außerhalb dieses Bereiches ergibt sich der Wert des Sinus daraus, dass der Sinus periodisch mit der Periode 360° (bzw. 2π rad) ist, d. h. . Außerdem gilt , , etc.
Verlauf des Kosinus in den vier Quadranten
Der Kosinus stellt einen um 90° (bzw. π/2 rad) phasenverschobenen Sinus dar und es gilt .
In den vier Quadranten ist der Verlauf der Kosinusfunktion daher folgendermaßen:
Für Argumente außerhalb dieses Bereiches lässt sich der Wert des Kosinus – so wie der des Sinus – periodisch mit der Periode 360° (bzw. 2π rad) bestimmen, d. h. . Außerdem gilt .
Komplexes Argument
Der Sinus ist auch für komplexe Eingabewerte definiert. Da sowohl Ein- als auch Ausgabe eine Zahl auf einer Ebene und nicht nur einem Strahl sind, schlagen die Versuche eines klassischen Schaubildes fehl, bei dem Ein- und Ausgabe jeweils 1-dimensional war ( und -Achse). Es kann aber mit Farben nachgeholfen werden: Ein beliebiger Punkt auf diesem Bild ist (ortstechnisch!) die Eingabe. Die angenommene Farbe symbolisiert über einen Farbschlüssel den Wert, den die Funktion annimmt. Die 0 ist schwarz, die Nullstellen usw. des Sinus lassen sich ablesen.Graph der komplexen KosinusfunktionFarbfunktion, die für die beiden obigen Bilder verwendet wurde
Für komplexe Argumente kann man Sinus und Kosinus entweder über die Reihenentwicklung oder über die Formeln
Sinus und Kosinus sind für reelle Argumente auf Werte aus dem Intervall beschränkt; im Definitionsbereich der komplexen Zahlen sind sie dagegen unbeschränkt, was aus dem Satz von Liouville folgt. Sinus und Kosinus können für komplexe Argumente sogar beliebige reelle oder komplexe Werte annehmen.
Zum Beispiel gilt:
Für reelle nimmt diesen Wert aber nie an.
In den Bildern auf der rechten Seite gibt die Farbe den Winkel des Arguments an, die Farbintensität den Betrag, wobei volle Intensität für kleine Werte steht und bei großen Beträgen ein Übergang zu weiß stattfindet. Die genaue Zuordnung ergibt sich aus nebenstehendem Bild, das jeder komplexen Zahl eine Farbe und eine Intensität zuordnet. An den Bildern zu Sinus und Kosinus ist erkennbar, dass auch im Komplexen Periodizität in -Richtung vorliegt (nicht aber in -Richtung) und dass Sinus und Kosinus durch eine Verschiebung um auseinander hervorgehen.
Spezielle Funktionswerte
Wichtigste Funktionswerte
Da Sinus und Kosinus periodische Funktionen mit der Periode (entspricht im Gradmaß ) sind, reicht es, die Funktionswerte der beiden trigonometrischen Funktionen für den Bereich (entspricht dem Bereich bis ) zu kennen. Funktionswerte außerhalb dieses Bereichs können also aufgrund der Periodizität durch den Zusammenhang
bestimmt werden. In Gradmaß lautet der Zusammenhang analog:
Hierbei bezeichnet eine ganze Zahl. Die folgende Tabelle listet die wichtigen Funktionswerte der beiden trigonometrischen Funktionen in einer leicht zu merkenden Reihe auf.[5]
Winkel (Grad)
Bogenmaß
Sinus
Kosinus
Weitere wichtige Werte sind:
Winkel (Grad)
Bogenmaß
Sinus
Kosinus
Beweisskizzen der Werte
In folgender Liste werden die Beweise für die einzelnen Werte skizziert dargestellt:
, weil das rechtwinklige Dreieck im Einheitskreis (mit der Hypotenuse 1) gespiegelt an der -Achse dann gleichseitig ist (mit Seitenlänge 1) und somit die Gegenkathete (Sinus) die halbe Seitenlänge beträgt.
, weil für das rechtwinklige Dreieck im Einheitskreis (mit der Hypotenuse 1) wegen für den Cosinus nach Pythagoras gilt .
und lassen sich mit Hilfe der Halbwinkelformeln für Sinus und Kosinus herleiten.
Die Fünftel der Werte können unter anderem so ermittelt werden:
Zusammenhang zwischen Sinus und Cosinus:
Verdopplungstheorem des Sinus:
Verdreifachungstheorem des Cosinus:
Durch Kombination der drei nun genannten Formeln entsteht diese Gleichung:
Weitere mit Quadratwurzeln angebbare Funktionswerte
Der Mathematiker Carl Friedrich Gauß entdeckte die Tatsache, dass die Sinus- und Cosinuswerte von den Siebzehnteln des Vollwinkels auf rein quadratisch radikale Weise dargestellt werden kann. Damit bewies er, dass das reguläre Siebzehneck mit Zirkel und Lineal alleine konstruiert werden kann. Besonders effizient können die Cosinuswerte des Musters mittels Lösen quadratischer Gleichungen ermittelt werden.
Tabellarisch lassen sich so nach Wickner insgesamt folgende Identitäten zusammenfassen:
Diese Formeln gehen aus dem Werk Solution to Problem 1562: A Tangent and Cosine Identity des Mathematikers John Wickner hervor und erklären die Konstruktion des Siebzehnecks über die Winkelvierteilungen.
Mit Winkeldreiteilung angebbare Funktionswerte
Die trigonometrischen Werte der Siebtel und der Dreizehntel können vereinfacht mittels Winkeldreiteilung dargestellt werden. Daraus folgt, dass das reguläre Siebeneck und das reguläre Dreizehneck mit der Kombination der Werkzeuge Zirkel, Lineal und Winkeldreiteiler dargestellt werden können:
Mulitplikationsformeln und begrenzte Reihe
Die folgenden Multiplikationsformeln gelten für alle und komplexen Argumente :
Zur Berechnung von Sinus und Cosinus gibt es mehrere Verfahren. Die Wahl des Berechnungsverfahrens richtet sich nach Kriterien wie Genauigkeit, Geschwindigkeit der Berechnung und Leistungsfähigkeit der verwendeten Hardware wie zum Beispiel Mikrocontroller:
Tabellierung aller benötigten Funktionswerte
Tabellierung von Funktionswerten zusammen mit Interpolationsverfahren
schnelle, aber grob genäherte Abschätzung mit Hilfe der Zwölftel-Regel
Die Tabellierung aller Werte ist angezeigt bei geschwindigkeitskritischen Echtzeitsystemen, wenn diese nur eine recht kleine Winkelauflösung benötigen. CORDIC ist i. d. R. effizienter umsetzbar als die Taylor-Reihe und zudem besser konditioniert.
Da sich zu einem gegebenen Wert ein passender Winkel im ersten oder vierten Quadranten und zu einem gegebenen Wert ein passender Winkel im ersten oder zweiten Quadranten konstruieren lässt, folgt aus diesen geometrischen Überlegungen, dass die Funktionen
werden Arkussinus bzw. Arkuskosinus genannt. Der Name rührt daher, dass sich deren Wert nicht nur als Winkel, sondern auch als Länge eines Kreisbogens (Arcus bedeutet Bogen) interpretieren lässt.
In der Analysis ist die Verwendung des Bogenmaßes praktisch, weil andernfalls (beim Gradmaß) oft die Identität zu berücksichtigen wäre. Die Sinusfunktion
Eine andere Interpretation des Wertes als doppelter Flächeninhalt des dazugehörigen Kreissektors am Einheitskreis ist ebenfalls möglich; diese Interpretation ist insbesondere für die Analogie zwischen Kreis- und Hyperbelfunktionen nützlich.
Zusammenhang mit dem Skalarprodukt
Der Kosinus steht in enger Beziehung mit dem Skalarprodukt zweier zwei- oder dreidimensionaler Vektoren und :
Das Skalarprodukt ist also die Länge der Vektoren multipliziert mit dem Kosinus des eingeschlossenen Winkels. In abstrakten Skalarprodukträumen wird über diese Beziehung der Winkel zwischen Vektoren definiert.
läuft um eine Viertelperiode voraus. Die in den Zerlegungskoeffizienten enthaltenen Gleichwerte folgen aus einer modifizierten Fourier-Analyse, bei der nicht die Sinus- und Kosinusfunktion, sondern und als Basis dienen. Durch Einsetzen der harmonischen Ansätze ergibt sich schließlich:
Die Zerlegung gilt auch bei Ansatz von und mit der Kosinusfunktion.
Ableitung, Integration und Krümmung von Sinus und Kosinus
Aus und der Kettenregel erhält man die Ableitung des Kosinus:
und daraus schließlich auch alle höheren Ableitungen von Sinus und Kosinus
Dabei ist es wegen (also ) egal, ob der Winkel im Grad- oder im Bogenmaß gemessen wird, denn für gilt nicht nur sondern auch Nur für die Ableitung des Sinus eines Winkels nach seiner Gradzahl käme ein störender Faktor hinzu:
Um dies zu vermeiden, wird üblicherweise in der Analysis der Winkel ausschließlich im Bogenmaß angegeben.
Stammfunktion
Aus den Ergebnissen über die Ableitung ergibt sich unmittelbar die Stammfunktion von Sinus und Kosinus:
berechnet. Für erhält man damit die Krümmungsfunktion
und für entsprechend
.
An den Wendepunkten ist die Krümmung gleich null. Dort hat die Krümmungsfunktion einen Vorzeichenwechsel. An der Stelle des Maximums ist die Krümmung gleich −1 und an der Stelle des Minimums gleich 1. Der Krümmungskreis hat an den Extrempunktem also jeweils den Radius 1.
Anwendungen
Allgemeines Dreieck
Skizze zum Beispiel
Mit der Sinusfunktion können auch im nicht rechtwinkligen Dreieck Größen, speziell die Höhen, berechnet werden; ein Beispiel ist die Berechnung von im Dreieck ABC bei gegebener Länge und Winkel :
Teilung des Winkels in gleich große Teile mithilfe der Sinuskurve
Die Sinuskurve ist eine der bekanntesten Funktionsgraphen. Trotz alledem ist nahezu nichts über ihre Eigenschaft bekannt, einen Winkel in gleich große Teile zu zerlegen. Das nebenstehende Bild zeigt exemplarisch die Teilung des Winkels in sechs gleich große Winkelweiten.[10]
Konstruktion
Zuerst wird ein Viertelkreis mit Radius gleich [11] um gezogen und anschließend der Radius über hinaus verlängert. Der Graph der Funktion , sprich die Sinuskurve, wird nun z. B. mittels einer Schablone oder einer sogenannten Dynamischen-Geometrie-Software (DGS) eingetragen. Dabei schneidet die Sinuskurve die Verlängerung des Radius und liefert so die Kreiszahl auf der -Achse.
In den nächsten Schritten werden vier Werte des Bogenmaßes für den 2. Quadranten der Sinuskurve auf der -Achse bestimmt mit jeweils gleichem Abstand zueinander. Es ist in diesem Fall für die Plausibilität von Vorteil, die Bogenmaße mit dem gemeinsamen Nenner zu bezeichnen. Durch Halbieren des Abstandes ergibt sich das Bogenmaß . Mittels einer Senkrechten und einer Parallelen – jeweils zur -Achse – wird auf den Viertelkreis übertragen; dabei trifft den Punkt .
Die darauf folgende Dreiteilung des Abstandes liefert, unter Verwendung des ersten Strahlensatzes, die Bogenmaße , und sowie die Schnittpunkte und . Das Übertragen dieser Punkte auf die Sinuskurve erfolgt mithilfe von Senkrechten zur -Achse; nun bezeichnet mit und . Anschließend werden diese Punkte mittels Parallelen zur -Achse auf den Viertelkreisbogen projiziert, nun bezeichnet mit und . Da die Bogenmaße quasi vom 2. Quadranten der Sinuskurve zum 1. Quadranten des Kreises wechseln, werden sie zu Pendants mit den Bezeichnungen und .
Auf die gleiche Art und Weise werden die Punkte und bestimmt und schließlich auf den Viertelkreisbogen, nun mit den Bezeichnungen und , übertragen. Im dargestellten Beispiel ist der Winkel der sechste Teil des Winkels .
Nachweis
Für die betreffenden Funktionswerte der Sinuskurve gilt: Der Winkel (Grad) entspricht dem Bogenmaß (Teil von bzw. ).
; ; ; ; ,
daraus folgt:
Der Winkel und das Bogenmaß sind zueinander direkt proportional, z. B.:
Dies bedeutet:
Der n-te Teil des Abstandes (z. B.: ) und der n-te Teil des Viertelkreisbogens (z. B.: ) sind gleich lang.
In der Physik werden Sinus- und Kosinusfunktion zur Beschreibung von Schwingungen verwendet. Insbesondere lassen sich durch die oben erwähnten Fourierreihen beliebige periodische Signale als Summe von Sinus- und Kosinusfunktionen darstellen, siehe Fourieranalyse.
Elektrotechnik
Leistungszeigerdiagramm und Phasenverschiebungswinkel bei sinusförmigen Spannungen und Strömen in der komplexen Ebene
Bei nicht sinusförmigen Größen (z. B. bei einem Netzteil mit herkömmlichem Brückengleichrichter am Eingang) entstehen Oberschwingungen, bei denen sich kein einheitlicher Phasenverschiebungswinkel angeben lässt. Dann lässt sich zwar noch ein Leistungsfaktor
angeben, dieser Leistungsfaktor darf aber mit nicht verwechselt werden.
↑J. Ruska: Zur Geschichte des „Sinus“. In: Zeitschrift für Mathematik und Physik. Teubner, Leipzig 1895. S. 126 ff. Auch online zugänglich: Digitalisierungszentrum der Universität Göttingen.
↑Josef Laub (Hrsg.): Lehrbuch der Mathematik für die Oberstufe der allgemeinbildenden höheren Schulen. 2. Band. 2. Auflage. Hölder-Pichler-Tempsky, Wien 1977, ISBN 3-209-00159-6, S. 207.
↑Wikibooks: Beweisarchiv: Analysis: Differentialrechnung: Differentiation der Sinusfunktion
↑Hung Tao Sheng: A Method of Trisection of an Angle and X-Section of an Angle. 4. Xsection of an angle, X = 7. In: Mathematics Magazine. 42, No. 2. Taylor & Francis, März 1969, S.79, JSTOR:2689193 (englisch).
↑Joebert S. Jacaba: AUDIO COMPRESSION USING MODIFIEDDISCRETE COSINE TRANSFORM: THE MP3 CODING STANDARD. (Memento vom 13. Juni 2010 im Internet Archive).
↑International Telecommunication Union: INFORMATION TECHNOLOGY – DIGITAL COMPRESSION AND CODING OF CONTINUOUS-TONE STILL IMAGES – REQUIREMENTS AND GUIDELINES






































































![{\displaystyle [-\pi /4,\pi /4]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3d50119f414fb00460abee3056e5e6b54e7289af)





















![{\displaystyle [0,2\pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/348d40bf3f8b7e1c00c4346440d7e2e4f0cc9b91)






































































![{\displaystyle [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/51e3b7f14a6f70e614728c583409a0b9a8b9de01)























































![{\displaystyle \cos {\bigl (}{\frac {3\pi }{10}}{\bigr )}=\cos {\bigl (}{\frac {\pi }{10}}{\bigr )}{\bigl [}1-4\sin {\bigl (}{\frac {\pi }{10}}{\bigr )}^{2}{\bigr ]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a4fab54dc10d2463e0cbd03d5b5fd1fdf560d716)
![{\displaystyle 2\sin {\bigl (}{\frac {\pi }{10}}{\bigr )}\cos {\bigl (}{\frac {\pi }{10}}{\bigr )}=\cos {\bigl (}{\frac {\pi }{10}}{\bigr )}{\bigl [}1-4\sin {\bigl (}{\frac {\pi }{10}}{\bigr )}^{2}{\bigr ]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b4b4ec03a1770e06cb1ef3c62c57f835141bbfc0)



![{\displaystyle {\bigl [}4\sin {\bigl (}{\frac {\pi }{10}}{\bigr )}+1{\bigr ]}^{2}=5}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2aa75b531c863568b798540750851042b353d08a)






![{\displaystyle \tan \left[{\frac {1}{4}}\arctan(4)\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8f17e164a4c5a8f6cbb52162a6530ba131db48d9)


![{\displaystyle -\cot \left[{\frac {1}{4}}\arctan(4)\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6aaa4dd5cc8fb267a44fea8e40d6c8058a5ebb94)


![{\displaystyle -\tan \left[{\frac {\pi }{4}}-{\frac {1}{4}}\arctan(4)\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ddee3b01a7e0d5943ba94ab0dcbf9dbdb0094d2d)


![{\displaystyle \cot \left[{\frac {\pi }{4}}-{\frac {1}{4}}\arctan(4)\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c0d423263588a8e4aaec8252fc23b4ec911aeac5)
![{\displaystyle {\color {magenta}\cos \left({\frac {2\pi }{17}}\right)}={\frac {1}{4}}\cot \left[{\frac {\pi }{4}}-{\frac {1}{4}}\arctan(4)\right]+{\frac {1}{4}}{\sqrt {\cot \left[{\frac {\pi }{4}}-{\frac {1}{4}}\arctan(4)\right]^{2}-4\tan \left[{\frac {1}{4}}\arctan(4)\right]}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/25a3bb68cd4a59beb2ef839a83e10e0c1376569f)
![{\displaystyle {\color {magenta}\cos \left({\frac {8\pi }{17}}\right)}=\sin \left({\frac {\pi }{34}}\right)={\frac {1}{4}}\cot \left[{\frac {\pi }{4}}-{\frac {1}{4}}\arctan(4)\right]-{\frac {1}{4}}{\sqrt {\cot \left[{\frac {\pi }{4}}-{\frac {1}{4}}\arctan(4)\right]^{2}-4\tan \left[{\frac {1}{4}}\arctan(4)\right]}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8328c32bc0fad3a3d20ac744ca39e1b6f017866b)
![{\displaystyle \sin \left({\frac {\pi }{7}}\right)={\frac {\sqrt {3}}{4}}\sec \left[{\frac {1}{3}}\arctan \left({\frac {\sqrt {3}}{9}}\right)\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9e3115bdf53de968c27bb7d6bbb29538d3b88223)
![{\displaystyle \sin \left({\frac {\pi }{13}}\right)={\frac {1}{12}}{\sqrt {26+6{\sqrt {13}}}}-{\frac {1}{6}}{\sqrt {26-6{\sqrt {13}}}}\,\cos {\biggl [}{\frac {1}{3}}\arctan {\biggl (}{\frac {3{\sqrt {3}}}{5}}{\biggr )}{\biggr ]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/eaeca4bfd8140eb24543f8c3c0e0210e17f1d936)












![{\displaystyle \sin \alpha \in [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6d2b9c9ec0172df2dfb58d2b036fda9a84f6b2fd)
![{\displaystyle \cos \alpha \in [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a634a6dde9cf18eb8cf130a2c15a1d60014f97a1)
![{\displaystyle {\begin{aligned}\sin \colon [-90^{\circ },90^{\circ }]&\to [-1,1]\\\cos \colon [0^{\circ },180^{\circ }]&\to [-1,1]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d893bbbfb98c7a9c64f628b3b349667617136098)
![{\displaystyle {\begin{aligned}\arcsin \colon [-1,1]&\to [-90^{\circ },90^{\circ }]\\\arccos \colon [-1,1]&\to [0^{\circ },180^{\circ }]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3c8d7b9f08cd6a81e5726386c366fe27d171eefa)

![{\displaystyle \sin \colon \left[-{\tfrac {\pi }{2}},{\tfrac {\pi }{2}}\right]\to [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a51c3d16054379dfbc2623fe03f4661d685f79c3)
![{\displaystyle \cos \colon [0,\pi ]\to [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/03260dc8f35e58b93063770373814a38a1070fad)
![{\displaystyle {\begin{aligned}\arcsin \colon [-1,1]&\to \left[-{\tfrac {\pi }{2}},{\tfrac {\pi }{2}}\right]\\\arccos \colon [-1,1]&\to \left[0,\pi \right]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c5e778332d02203c8f55c3c77400d34e8fb7f6b3)

















































![{\displaystyle 1\;[LE]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2e3aff74d03571df0fa6c73385b648217840fab0)
































![{\displaystyle L^{2}[-\pi ,\pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/20068d1913d7c592e020af9f2b46f4654ae2fc27)
![{\displaystyle [-\pi ,\pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cb064fd6c55820cfa660eabeeda0f6e3c4935ae6)

![{\displaystyle f\in L^{2}[-\pi ,\pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f352f471527bbe1e000af3b12318e9e8d562dce5)














![{\displaystyle [LE]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f0a643a7d27548b5574c1d5ed4e0e0847d4d1fa1)










