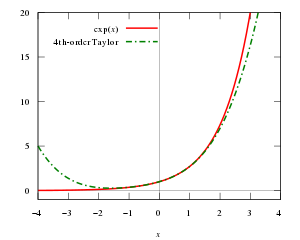
La función exponencial (línea roja continua) y su aproximación mediante un polinomio de Taylor alrededor del origen de coordenadas (línea verde discontinua)
En cálculo diferencial, el teorema de Taylor, recibe su nombre del matemático británico, Brook Taylor, quien lo enunció con mayor generalidad en 1712, aunque previamente James Gregory lo había descubierto en 1671.[1] Este teorema permite obtener aproximaciones polinómicas de una función en un entorno de cierto punto en el que la función sea diferenciable. Además el teorema permite acotar el error obtenido mediante dicha estimación.
Caso de una variable
Enunciado del teorema
La versión más básica del teorema es como sigue:
Teorema de Taylor.[2][3][4] Sea y sea una función diferenciable veces en el punto . Entonces existe una función tal que
con . Esta es la llamada forma de Peano del resto.
Brook Taylor
El polinomio que aparece en el teorema de Taylor,
se denomina polinomio de Taylor de orden de la función en el punto . El polinomio de Taylor es el único polinomio que «mejor aproxima la función en forma asintótica», en el sentido de que si existe una función y un polinomio de orden tal que
entonces . El teorema de Taylor describe el comportamiento asintótico del término del resto
el cual es el error de aproximación cuando se aproxima f con su polinomio de Taylor. Utilizando la notación o el teorema de Taylor se puede expresar de la siguiente forma:
Fórmulas explícitas para el resto
Existen diferentes formas de expresar que se mencionan a continuación:
Forma de valor medio del resto. Sea , diferenciable veces en el intervalo abierto con continua en el intervalo cerrado entre y . Entonces
para algún número real entre y . Esta es la forma de Cauchy[6] del resto.
Usualmente, esta refinación del teorema de Taylor, se demuestra con el teorema del valor medio, de ahí su nombre. También se pueden hallar expresiones similares. Por ejemplo, si es continua en el intervalo cerrado y diferenciable con derivadas no nulas en el intervalo abierto entre y , entonces
para algún número entre y . Esta versión generaliza las formas de Lagrange y Cauchy del resto, que son tomadas como casos especiales, y se demuestran usando el teorema del valor medio de Cauchy.
En el caso de la forma integral del resto, se requieren conceptos de la teoría integral de Lebesgue para una generalidad completa. Sin embargo, se mantiene el concepto que provee la integral de Riemann donde la derivada -ésima de es continua en el intervalo cerrado .
Para algunas funciones , se puede probar que el resto, , se aproxima a cero cuando se acerca al infinito; dichas funciones pueden ser expresadas como series de Taylor en un entorno reducido alrededor de un punto y son denominadas funciones analíticas.
El teorema de Taylor con expresado de la segunda forma es también válido si la función tiene números complejos o valores vectoriales. Además existe una variación del teorema de Taylor para funciones con múltiples variables.
Acotación del resto
Suele ser muy útil en la práctica acotar el término del resto de la aproximación de Taylor, en lugar de tener la fórmula exacta de este. Suponiendo que es continuamente diferenciable veces en un intervalo que contiene a . Suponemos que hay constantes y tal que
en el intervalo . Entonces el término del resto satisface la desigualdad[8]
Si , y similarmente si . Esta es una consecuencia simple de la forma de Lagrange del resto. En particular, si
sobre un intervalo con algún , entonces
para todo . A la segunda desigualdad se la llama acotación uniforme, porque permanece uniformemente para todo x sobre el intervalo .
Ejemplo
Aproximación de ex (azul) por su polinomio de Taylor Pk de orden k = 1, …, 7 centrado en x = 0 (rojo)
Suponiendo que se desea aproximar la función en el intervalo con un error no mayor a . Este ejemplo necesita que se conozcan las siguientes propiedades de la función exponencial:
De estas propiedades se tiene que para todo , y en particular, . Entonces el polinomio de Taylor de orden de en y su resto bajo la forma de Lagrange son:
donde es algún número entre y . Ya que es creciente (*), podemos usar simplemente que para para acotar el resto sobre el subintervalo . Para obtener una cota superior para el resto en , usamos la propiedad para para acotar
usando la expansión de Taylor de segundo orden. Entonces resolvemos para deducir que
simplemente maximizando el numerador y minimizando el denominador. Combinando estas acotaciones para vemos que
así se alcanza la precisión requerida, donde
(ver factorial o calcular manualmente los valores 9!=362 880 y 10!=3 628 800). Como conclusión, el teorema de Taylor permite la aproximación
Luego, esta aproximación nos da la expresión decimal e ≈ 2,71828, correcta hasta cinco dígitos decimales.
Demostración
Sea[9]
donde, como dice en el enunciado del teorema de Taylor,
Es suficiente mostrar que
La demostración de (1) se basa en la aplicación repetida de la regla de L'Hôpital. Se observa que, para cada , . De aquí que cada una de los primeras derivadas del numerador en se anula en , y lo mismo sucede con el denominador. También, ya que la condición de que la función sea veces diferenciable en un punto requiere diferenciabilidad de orden en un entorno de dicho punto (esto es así, porque la diferenciabilidad requiere una función definida en un entorno del punto), el numerador y sus derivadas son diferenciables en un entorno de . Claramente, el denominador también satisface dicha condición, y adicionalmente, no se anula a menos que , por lo tanto se satisfacen todas las condiciones para la regla de L'Hôpital, y así se justifica su utilización. Por lo tanto,
donde queda la anteúltima igualdad por la definición de la derivada en .
Obtención de la forma de valor medio del resto
Sea una función real, continua sobre un intervalo cerrado entre y y diferenciable con derivadas no nulas sobre el intervalo abierto entre y , y la función que se define como
para algún sobre el intervalo abierto entre y . Se observa que el numerador es exactamente el resto del polinomio de Taylor para . Calculando
reemplazando en y reorganizando los términos para hallar que
Esta es la forma del término que mencionamos como «resto», después enunciamos el teorema de Taylor con el resto bajo la forma del valor medio. La forma de Lagrange del resto puede obtenerse haciendo y la forma de Cauchy haciendo .
Observación. Usando este método también se puede recurrir a la forma integral del resto haciendo
pero los requerimientos de necesitados para usar el teorema del valor medio son más fuertes, si se tiene el objetivo de probar el caso en que es únicamente continua absolutamente. Sin embargo, si se usa la integral de Riemann en vez de la integral de Lebesgue, los requerimientos no pueden ser tan débiles.
A partir de aquí se usa la integración por partes y se usa una vez más el teorema fundamental del cálculo para ver que
que es exactamente el teorema de Taylor con resto en la forma integral para el caso . La enunciación general se demuestra usando la inducción. Suponiendo que
Integrando el término del resto por partes se llega a que
Substituyendo esto en la fórmula se muestra que si se tiene para el valor , debe obtenerse también para el valor . Por lo tanto, ya que se tiene para , se tiene para cualquier valor entero positivo .
Caso de varias variables
El teorema de Taylor anterior (1) puede generalizarse al caso de varias variables como se explica a continuación. Sea una bola en centrada en , y una función real definida sobre la clausura cuyas derivadas parciales hasta de orden son todas continuas en cada punto de la bola. El teorema de Taylor establece que para cualquier :
,
donde la suma se extiende sobre los multi-índices α (esta fórmula usa la notación multi-índice). El resto satisface la desigualdad:
para todo con . Tal como sucede en el caso de una variable, el resto puede expresarse explícitamente en términos de derivadas superiores (véase la demostración para los detalles).
Demostración
Para demostrar el teorema de Taylor para el caso multidimensional, considérese un función o campo escalar, que suponemos continuo y, para simplificar lo expuesto (aunque una generalización es trivial), de clase . Sea una función vectorial que va de , y definámosla como (de ahora en adelante, se omitirán las flechas de los vectores). Pongamos Ahora hagamos y recordemos que . Notemos ahora que:
Ahora, derivando sucesivas veces, encontramos que podemos poner de forma muy cómoda:
representa la derivada direccional, y el exponente sobre ella es entendido como las sucesivas veces que la hacemos sobre la función; es decir, hacemos la derivada direccional veces. Ahora, empleando el teorema de Taylor para una variable real, expandimos en su serie de McLaurin:
y haciendo t=1 y sustituyendo las derivadas por las expresiones antes hallada se evidencia que:
Obsérvese que el primer término aparece el gradiente y en el segundo la matriz hessiana, pero escrito con esta notación particular que resulta más cómoda y compacta. La expresión obtenida es equivalente a la expresada más arriba mediante la notación multiíndice.
↑Genocchi, Angelo; Peano, Giuseppe (1884), Calcolo differenziale e principii di calcolo integrale(en italiano), (N. 67, pp. XVII–XIX): Fratelli Bocca ed..
↑Spivak, Michael (1994), Calculus (3rd edición), Houston, TX: Publish or Perish, p. 383, ISBN 978-0-914098-89-8.
Bartle, R. G.; Sherbert, D. R. (1990). Introducción al Análisis Matemático de una Variable. Limusa. ISBN 9681817257.
Apostol, Tom M. (2005). Cálculus. Cálculo con funciones de una variable, con una introducción al álgebra lineal (Francisco Vélez Cantarell, trad.) 1. Reverté. ISBN 9788429150025. Resumen divulgativo.
Kline, Morris (1972). Mathematical thought from ancient to modern times, Volume 2(en inglés). Oxford University Press.
Kline, Morris (1998). Calculus: An Intuitive and Physical Approach(en inglés). Dover. ISBN 0-486-40453-6.
Stromberg, Karl (1981). Introduction to classical real analysis(en inglés). Wadsworth. ISBN 978-0-534-98012-2.




























![{\displaystyle [a,x]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/692f0edd0d40232c8a69ed5de7b142e1e343eff7)




















![{\displaystyle [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/51e3b7f14a6f70e614728c583409a0b9a8b9de01)








![{\displaystyle x\in [-1,0]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/76e131a08542f8cc42283848bc7cbafb0ad5e765)
![{\displaystyle [-1,0]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5a19442d946499667f5bd3ddf8478ca48a0ec38a)































![{\displaystyle {\begin{aligned}\int _{a}^{x}{\frac {f^{(k+1)}(t)}{k!}}(x-t)^{k}\,dt=&-\left[{\frac {f^{(k+1)}(t)}{(k+1)k!}}(x-t)^{k+1}\right]_{a}^{x}+\int _{a}^{x}{\frac {f^{(k+2)}(t)}{(k+1)k!}}(x-t)^{k+1}\,dt\\=&\ {\frac {f^{(k+1)}(a)}{(k+1)!}}(x-a)^{k+1}+\int _{a}^{x}{\frac {f^{(k+2)}(t)}{(k+1)!}}(x-t)^{k+1}\,dt.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a6389635717cc93be2b76539da45a18411376e16)















![{\displaystyle g(t)=f[\mathbf {r} (t)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/465bd93ff06d02fa9a976658675675d1966dca43)

![{\displaystyle g^{\prime \prime }(t)=u_{1}[D_{11}f(\mathbf {y} )u_{1}+..+D_{1n}f(\mathbf {y} )u_{n}]+\ldots +u_{n}[D_{n1}f(\mathbf {y} )u_{1}+..+D_{nn}f(\mathbf {y} )u_{n}]=\sum _{j=1}^{n}\sum _{i=1}^{n}{\dfrac {\partial ^{2}f(\mathbf {y} )}{\partial x_{j}\partial x_{i}}}u_{j}u_{i}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4e0b427c4c2685ec710715fbdcc2f1841da97e4a)







 Datos: Q1137206
Datos: Q1137206







